
Pocket Delta机器人。
如今各种微装配任务对驱动技术的要求越来越高。随着微型组件及系统微型化趋势的不断深入,大型生产系统的研发陷于停滞。一家来自瑞士西部的公司凭借其推出的一整套Delta机器人产品系列给市场带来了一场革新。强力型maxon电机为执行高精度的动态动作提供保证。
Asyril擅长于研发和集成机电系统,实现对微型组件以及以微型技术、纳米技术和生物技术为基础的微型部件的快速、灵活和自动化操作。这家以CSEM和CPA 集团专有技术为基础的企业于2007年由微型机器人专家Alain Codourey博士创立。之前,这个领域中的一个核心问题在于,究竟是否能够制造出一个100 x 100 x 100 mm3的微型机器人,并且这样的一个机器人的各项动作是否能够理想的符合人体运动学标准?早在10年之前,瑞士电子和微技术中心 (CSEM) 的研究者们就已经意识到日益小型化的微型部件与生产系统之间不断升级的矛盾。虽然,机器人的机械结构微型化相对容易,但驱动装置微型化手段则较为有限:“在常规系统中,相比机械结构,电机的规格要大很多。因此,类似屈臂机器人的常规动作就显得怪异。因为在机器人的铰接关节部位必须安装大规格电机”,Dr. Alain Codourey解释道。
为了给这个不断增长的矛盾找到出路,一个以微型机器人专家Codourey为核心,由CSEM中心和Biel专科学校的专家组成的研究团队踏上了寻找优化微型技术部件操作系统的道路。“最终,我们发现,并联运动结构为我们实现目标带来了希望”,Codourey博士说道。
在此目标指引下,我们首先完善了并联运动轴系统的设想。为了获得最低的转动惯量,所有部件的设计都要尽可能细巧、轻盈。Delta配置的一大优点在于,虽然maxon电机负责动作执行,但是电机本身并不移动。电机被固定于支撑臂上并将动作直接传递给结构体。这一设计理念被贯穿于整个Delta机器人的产品系列中:无论是“Desktop Delta”、“Power Delta”还是“Pocket Delta”产品都按此原理设计制造。
微型装配过程中的超薄驱动技术
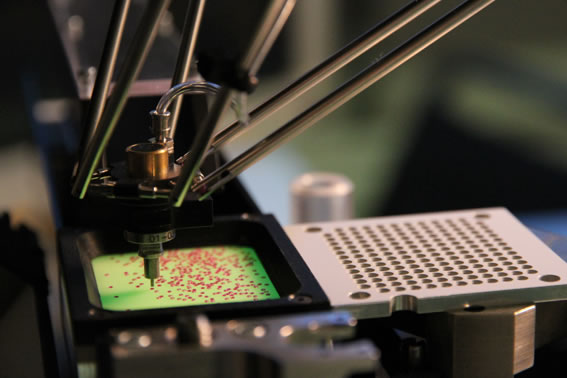
不仅机械结构进行了瘦身,驱动装置本身也存在精简空间。Pocket Delta产品中以maxon的紧凑式微电机来取代体型过大、高功率的高散热电机。机器人的并联机构由3台EC-i 40电机驱动。这三台电机都被安装在机器人上方的一块安装板上。如此,运动质量被大大减少,而机器人的动能被大幅提高。整个拿放过程 (Pick-and-Place),Pocket Delta 只需要0.33 秒,实现了1秒钟3个周期的循环。结合运动学结构的高刚性特点后,该机器人的重复精度可以达到3微米以下。
无刷DC电机的直径仅为40 mm,而功率可达50瓦。为了使Delta机器人不仅具备速度优势,而且在精度上表现突出,电机角位置的测量必须极为精准。为此,微电机直接与高精度旋转编码器连接以进行位置检测。此外,每台电机都配有一个由Asyril自行设计的驻车制动器。其实质是通过弹簧对电机轴制动的小销。在机器人工作过程中,电磁铁会将销钉吸走以松开制动。机器人的控制系统与机器人完全集成,通信则通过以太网接口来实现。这类微型机器人的特性非常适用于小型部件的移动和组装。与同类机器人相比,他被视为速度最快、精度最高的机器人。该设计的另一优点在于,Pocket Delta甚至可以弃用齿轮箱。
Pocket Delta机器人可应用于各种不同的工业领域。尤其是在钟表业中,对微型部件的分类、选择和加工使其得到了充分的用武之地。包括螺钉、铆钉、销钉或齿轮在内,机械机芯里几乎所有零件的装配都可以由其一手解决。医疗技术以及电子及半导体工业领域也是Pocket Delta展露头角的场所。常规活动零件的规格一般在0.5至15毫米之间。
编辑 maxon motor AG




{kind=link}
{kind=link}
{kind=link}
{kind=link}