
地球上方400公里
国际空间站(ISS)实在是一项科技工程壮举。 在全球最顶级的研究实验室内,maxon的驱动系统也站一席之地,例如在实验性机器人方面。
国际空间站已绕地球轨道飞行15年, 并由美国航空航天局(NASA)、俄罗斯联邦航天局(Roskosmos),欧洲航天局(ESA)、加拿大航天局(CSA)和日本宇宙航空研究开发机构(JAXA)共同使用。 国际空间站自2000年11月启用以来,迄今已有216名宇航员曾飞往空间站,以对其进行扩展作业并执行研究项目。 从2001年以来,已有超过900多项来自63个国家的实验项目在此完成。 这些实验项目包括研究植物在失重环境下的生长情况、人类肌肉和骨骼在太空中为何会衰退以及失重环境对人类免疫细胞的影响。 因为,如今人们就已经意识到,宇航员的免疫系统在太空环境下会削弱。 瑞士卢塞恩大学Biotesc团队的负责人Alexandra Deschwanden更是明确指出:“在太空中,人类的免疫系统就像老年人的免疫系统那样”。 该团队曾于2015年1月初将两项研究项目随SpaceX天龙号飞船送上国际空间站。 要在国际空间站内进行实验,技术装备不可或缺,其中包括各种不同的实验室器材。 机器人在此也扮演了重要的角色,它必须执行宇航员交托的任务,或是在一旁协助宇航员。
特殊机器人实验
在2012年至2013年,一台名为“REX-J”的实验机器人(JEM机器人实验)被应用在国际空间站的日本Kibo模块中。 这台机器人由日本宇宙航空研究开发机构研发制成。实验目标在于开发新一代能沿着国际空间站外壳和内部移动、搬运重物或执行检测任务的太空机器人(Astrobot)。
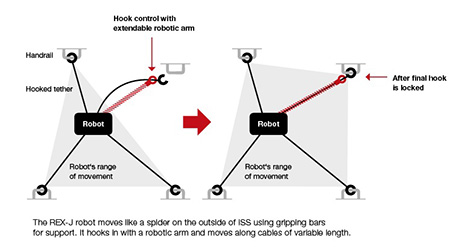
此机器人的独特之处在于可利用一套电缆支承系统来移动。 首先利用钩子将机器人固定在空间站的扶杆上,这些扶杆原本是宇航员在执行外部作业时用来保障安全的。 活动式机器人有一支伸缩臂,末端装有一只机械手,可用于将安全电缆安装在最多三个不同的固定点。 借此,机器人便能够以蜘蛛般的爬行方式在物体表面上行进。 机器人由地面工作站以遥控方式操作,因此不需要国际空间站成员的协助。
REX-J利用安全电缆并以扶杆为固定点,像蜘蛛一样沿着国际空间站的外壳移动。 它用机械手臂钩紧扶杆,然后沿着长度可调的电缆移动。
强劲的驱动系统实现精准的动作
REX-J中采用了多套maxon驱动系统——在伸缩式机械手臂中也是如此。 其手关节具有两个自由度: 垂直和水平。 手关节和机械手臂中采用了无刷EC-max电机、行星齿轮箱和编码器。
电机的电子控制器位于机械手臂末端。 例如:在机器人旋转机构和电缆线盘(卷绕装置)中也采用了maxon驱动系统。
REX-J参与的所有实验项目均成功完成。 JAXA将继续开发这套机器人系统,使这套系统在未来能被应用在空间站的更多不同任务中: 其中包括监控国际空间站设备,以及为太空站执行外观检测,从而可以识别太空站外壳损坏情况。 从长远来看,应设计制造能执行太空中大构架任务的太空机器人。
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}