
爱踢足球的智能微型机器人。
名叫DARwIn-OP(带智能开放平台的动态仿真机器人)的小机器人主要用于研究和教育目的。因为机器人是基于开源的,所以完全可以由用户根据自己的设想来设计编程。maxon电机确保机器人动作的精确和快速。
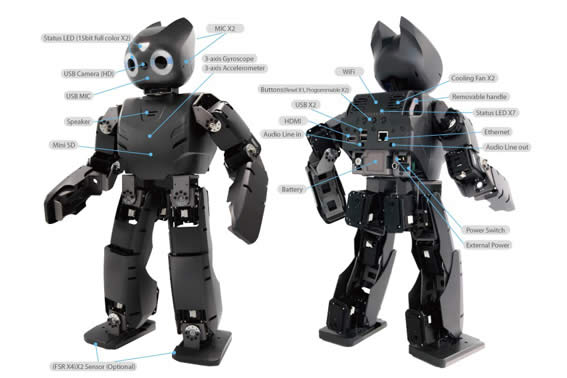
约45厘米高的机器人配备高度发达的传感器并具备执行动态动作的能力。他能快速奔跑(24厘米/秒或更快)、听说和操作,具有自我平衡和独立工作的能力。他最大的爱好之一是踢足球。2012年6月,Darwin队与其他来自不同国家的24个机器人队在墨西哥城比赛,最后获得RoboCup冠军奖。
该仿真机器人最大的特点是具有开放的模块化结构,易于修改。DARwIn-OP是一个完全开放的平台,可任意更改硬件和软件及使用不同的编程语言(如C++、Python、LabVIEW、MATLAB等)。所有零部件的CAD文件及生产和组装说明书可以免费在线下载。机器人内部装有一台电脑,和普通电脑一样配有多种接口如Ethernet、USB和HDMI。通过头部集成的USB照相机,机器人能够对物体进行定位,比如可以在球赛中识别足够。
DARwIn-OP项目在美国国家科学基金会 (NSF) 的资助下由弗吉尼亚科理工学院的“机器人与机器装置实验室“ (RoMeLa) 与宾夕法尼亚大学、普杜大学和韩国企业ROBOTIS共同合作开发。迷你机器人以屡获殊荣的Darwin系列为基础,该系列机器人于2004年开发成功。机器人高度的灵活性归功于ROBOTIS。
该企业是Dynamixel执行器的制造商。该产品被世界各地的大学和研究中心应用于机器人的独立开发。Dynamixel是专用于机器人的智能执行器,内部装有DC电机。它不仅定位精确、性能优异,而且功能广泛。这种带内置控制器的一体化驱动模块具有大量反馈功能(定位、速度、输入电压、内部温度),可通过网络调控。Dynamixel执行器通过RoboPlus(ROBOTIS公司的免费图形编程软件)进行编程。DARwIn-OP是机器人在借助执行器的帮助下能够做出智能反应的一个极佳例证。
制造机器人手臂、活动机器人及仿真机器人时都会用到该驱动模块。每个Dynamixel内部都有一个maxon RE-max电机。RE-max电机采用钕磁钢,功率高达0.75至22 W 。共有三种maxon RE-max电机用于小机器人。其中一种是RE-max 24,其传动小齿轮已适当调整,更适于机器人应用。DARwIn-OP机器人共装有20个Dynamixel MX-28,12个用于手臂,6个用于双腿,2个用于颈部。Robotis选择了maxon电机,因为maxon的产品虽然尺寸小、重量轻,但是功率强大,并且结构坚实、耐用性高。
机器人保持平衡
机器人由电池供电。充满电后,重约2.9公斤的DARwIn-OP可以连续执行各种不同的动作30分钟左右。甚至可以倒立。为了避免失去平衡,由三台陀螺仪传感器(平衡传感器模块)来负责平衡(参见Video).
© maxon motor ag




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}